Technik

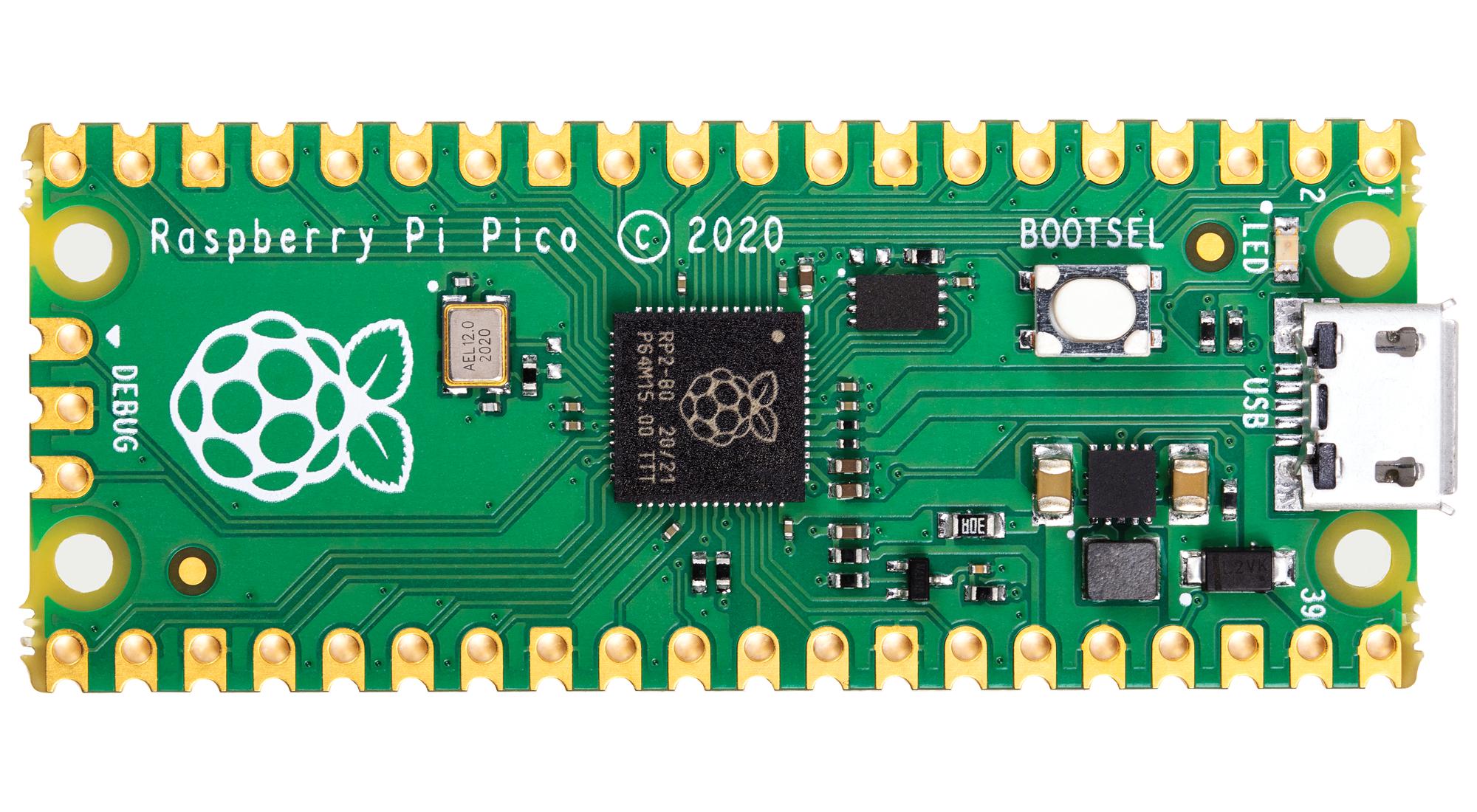
Der Mikrocontroller ist das Herzstück unserer Dose. Über ihn werden alle Prozesse und Vorgänge im Satelliten gesteuert sowie die gesammelten Daten gespeichert. Dieses Modell verfügt über ein Speicherplatz vom 2MB und 40 individuell nutzbaren Pins, die je nach belieben verwendet werden können. Er ist allgemein einfach zu bedienen und zu programmieren und läuft mit einer für microcontroller dieser Art entwickelten Version von Python namens Micropython.
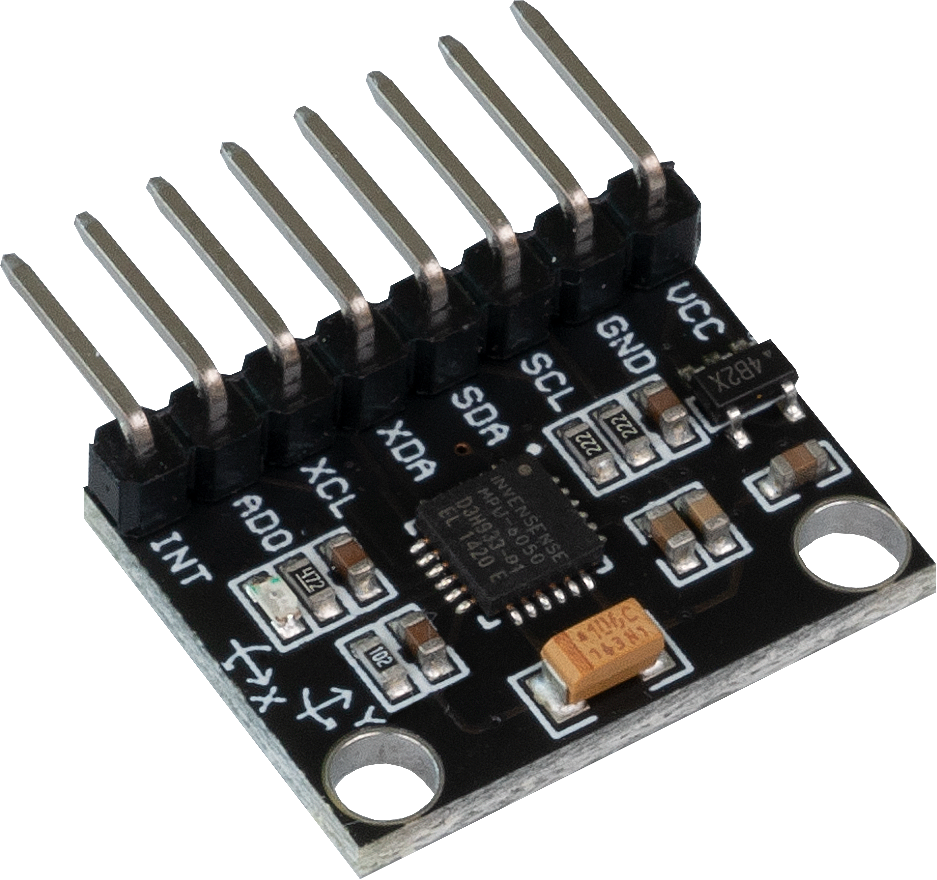
Ein Gyroskop- und Beschleunigungssensor, der die Bewegung und Orientierung misst, um Neigungswinkel und Beschleunigung festzustellen. In unserem Satelliten ist er ein wichtiger Bestandteil des Aufstehmechanismus.
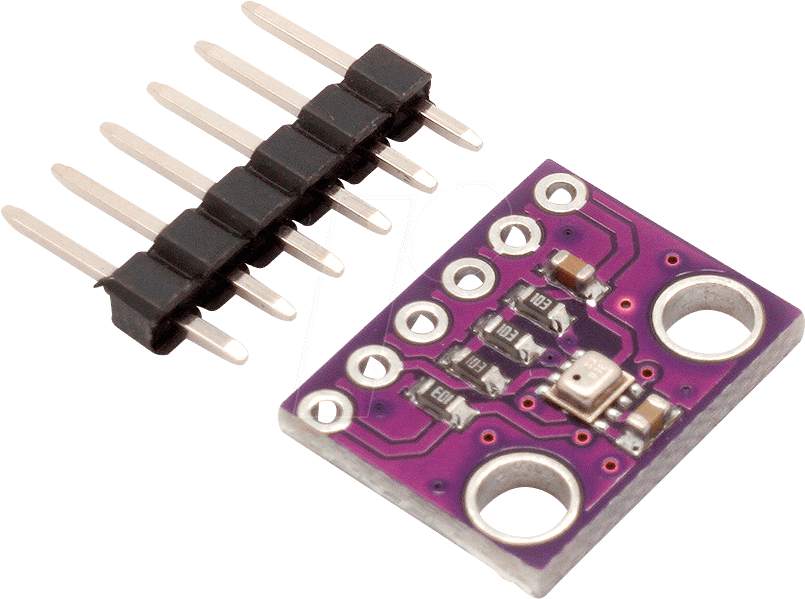
Ein Barometer- und Temperatursensor zur Messung von Druck, Temperatur und Luftfeuchtigkeit, zur Bestimmung der Höhe und Wetterbedingungen.

Dieser Sensor wurde und großzügigerweise von unserem Sponsor airQ zur Verfügung gestellt. Es handelt sich um einen Feinstaubsensor, der die Konzentration von Partikeln in der Luft misst, darunter PM2.5 und PM10, zur Bewertung der Luftqualität.
Die Daten werden per Funkübertragung an die Bodenstation gesendet. Dafür verwenden wir das Ebyte E220 Modul, das auf der LoRa-Technologie basiert. Es ermöglicht eine zuverlässige Übertragung auch über größere Entfernungen, wobei diese wenig Energie benötigt. Zusätzlich lassen die Frequenz und andere Parameter dieses Geräts leicht anpassen, was es zur Wahl für unser Projekt macht.
Dieser Lithium-Polymer-Akku mit einer Spannung von 3,7V und einer Kapazität von 1800mAh versorgt den Raspberry Pi Pico und damit unsere Dose mit Energie.

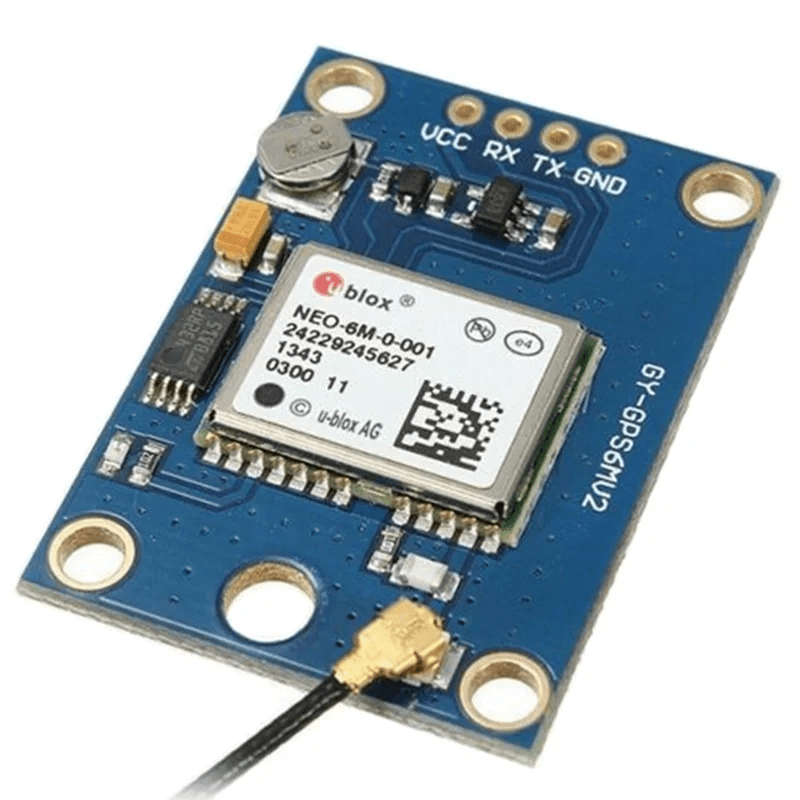
Das GPS-Modul erfasst die exakte Position der CanSat während des Fluges. Es ermöglicht die Nachverfolgung der Flugbahn und die Bestimmung des Landeortes. Außerdem werden die gesammelten Daten an die Bodenstation übermittelt und dienen als Grundlage für die Ausrichtung der Kamera und dadurch der automatisierten Verfolgung des Satelliten